SmartPark Assistant
An Arduino-based parking assistance prototype using ultrasonic distance sensing, dynamic buzzer feedback, and real-time proximity logic.
SmartPark Assistant was one of my early hardware experimentation projects — built while exploring Arduino, embedded systems, and real-world sensor interaction.
“This was the project where software stopped being just code on a screen and started interacting with the physical world.”
Project Overview
The system was designed as a compact parking assistance prototype using an ultrasonic distance sensor, LED indicators, and a buzzer feedback system. Based on object proximity, the system dynamically adjusted beep frequency and visual feedback to help simulate real-world parking assistance behavior.
System Design
The system continuously measured object distance using the HC-SR04 ultrasonic sensor and processed the incoming signal using Arduino-based logic.
- —Ultrasonic distance sensing using HC-SR04
- —Dynamic buzzer feedback based on proximity
- —LED visual indicators for close-range detection
- —Distance calculation using echo timing
- —Real-time response loop with calibrated thresholds
if (distance < 10) {
digitalWrite(ledPin, HIGH);
beep(200, 1000);
}
else if (distance < 20) {
beep(100, 1500);
}
else if (distance < 30) {
beep(150, 1000);
}Engineering Challenges
The most difficult part of the project was calibrating reliable distance thresholds while maintaining responsive feedback behavior. Small changes in timing or sensor readings could drastically affect the user experience.
Considerable tuning was required to balance sensor responsiveness, buzzer timing, and LED behavior without creating false triggers or inconsistent feedback.
“Even simple embedded systems require careful balancing between hardware behavior and software logic.”
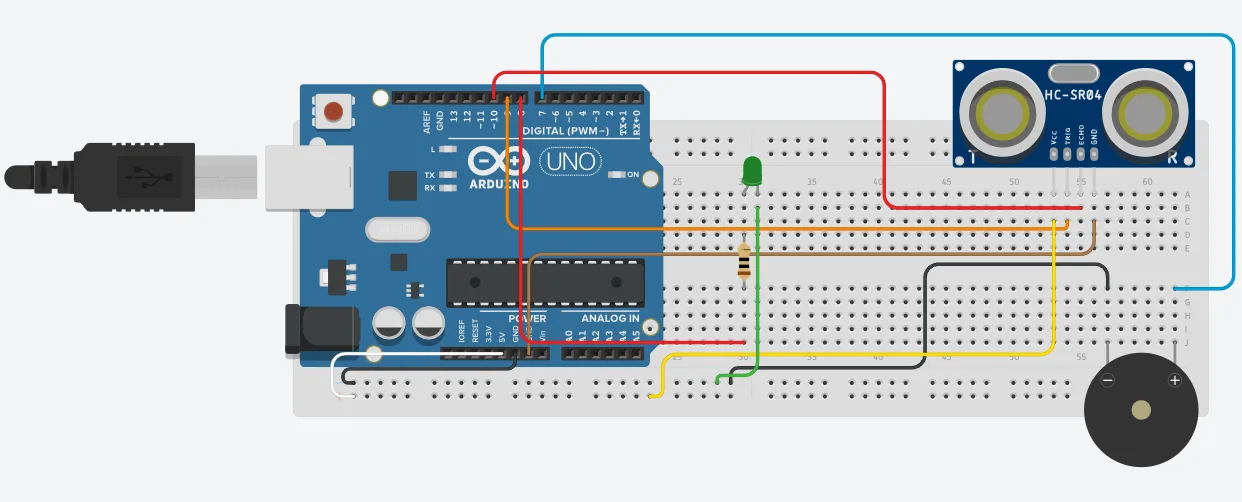
Circuit Architecture
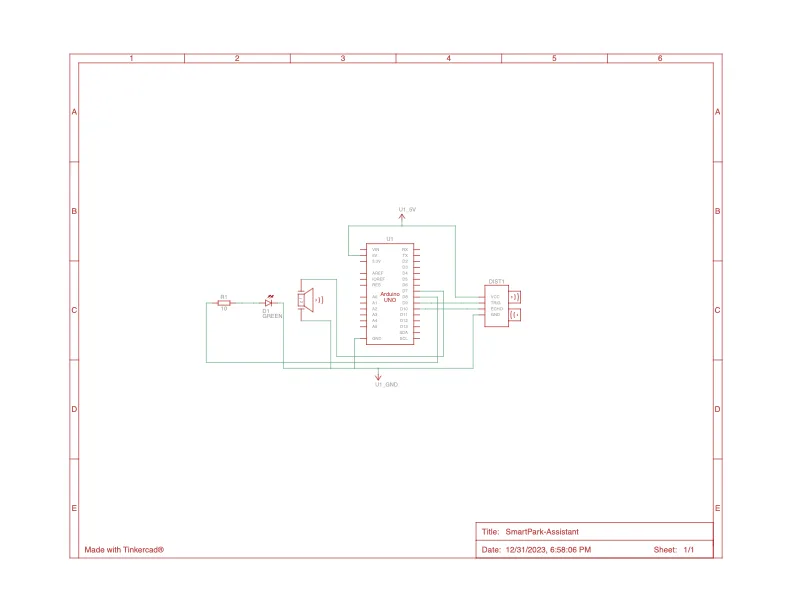
The project was physically assembled, wired, and tested using a breadboard-based architecture. The final prototype successfully responded to real-world distance changes with stable feedback behavior.
Technical Stack
Learning Outcome
This project became one of my first real introductions to embedded systems and hardware-software interaction. It helped me understand how logic written in software directly influences physical electronic behavior.
More importantly, it showed me how systems like these exist everywhere in the real world — from parking assistance systems to industrial automation and robotics.
“Building physical systems teaches a different kind of debugging — one where wires, timing, hardware noise, and logic all matter together.”